The Last Millimeter Problem: Force Control Where Speed Meets Fragility
A technical perspective on protecting high-value workpieces in modern automated precision assembly

Walk onto any precision assembly floor in Stuttgart or Silicon Valley, and you will hear the same quiet anxiety beneath the hum of servo motors. It is not about throughput. It is not about cycle time. It is the sound of engineers holding their breath during the final millimeters of a press-fit, a delicate component placement, or a touch-panel adhesion cycle — because they know what happens when force overshoots its target.
One moment of overshoot. One cracked ceramic substrate. One deformed flex circuit. One scrapped medical cartridge that costs more than a luxury sedan.
Then the line stops. The root-cause analysis begins. The finger-pointing between mechanical design, controls engineering, and process quality teams commences. And somewhere in the back of the production manager's mind, a calculator starts running: How many units did we just write off? How many hours of uptime evaporated?
The Overshoot Problem Nobody Talks About Loudly Enough
In precision assembly, we have spent decades optimizing for speed, repeatability, and positional accuracy. Linear encoders reached sub-micron resolution. Motion controllers achieved microsecond-level command updates. Mechanical designs grew stiffer, lighter, and more deterministic. Yet force control — the final frontier of precision motion — remained stubbornly problematic.
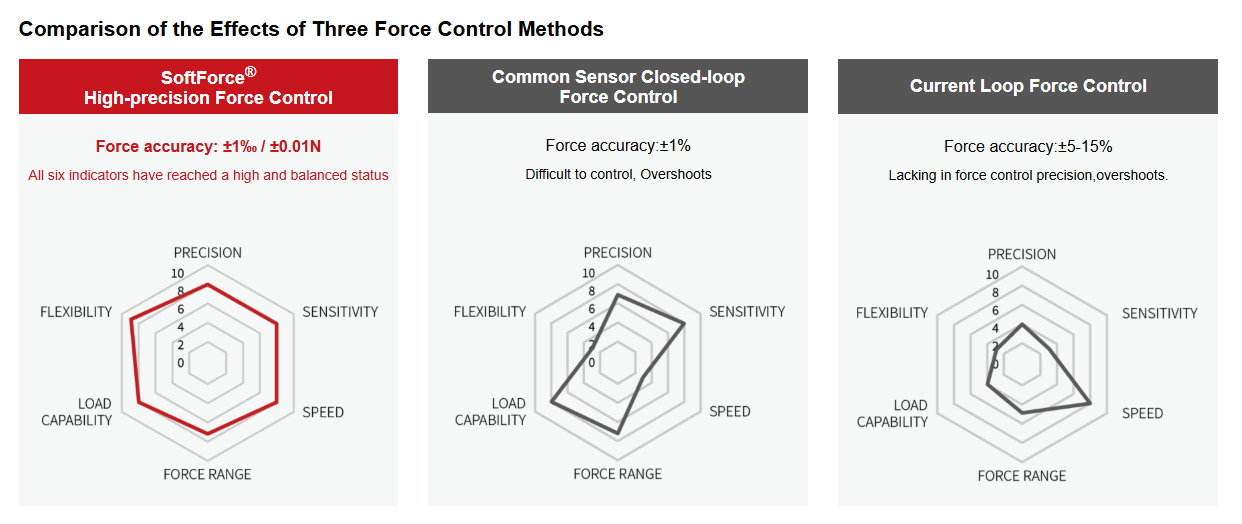
The physics are unforgiving. When a high-speed actuator approaches a workpiece, kinetic energy must be dissipated at contact. Traditional current-loop force control systems, still prevalent across the industry, operate with force accuracies typically in the ±5% to ±15% range. More critically, they suffer from inherent overshoot at the moment of contact. The actuator does not know the workpiece is there until it is already too late. By the time the control loop reacts, the damage is done.
Sensor-based closed-loop systems improved matters marginally, pushing accuracy toward ±1%. But they introduced their own compromises: slower response times, complex calibration requirements, and vulnerability to mechanical resonance. The fundamental trade-off between force precision and dynamic response persisted. Engineers learned to live with it — programming slower approach speeds, adding mechanical compliance, building expensive tooling nests with overtravel protection.
These are not solutions. They are workarounds. And in an era where precision assembly increasingly involves high-value, fragile, and tolerance-sensitive components, workarounds are becoming unsustainable.
The Economics of a Single Overshoot Event
Consider a typical precision press-fit operation in automotive electronics: a connector housing mated to a PCB assembly. The housing costs perhaps €12. The PCB with populated components runs €340. The labor, overhead, and opportunity cost of scrapping a partially assembled unit at that station? Easily €500 per event. Now consider that this operation runs 24/7 at a 4-second cycle time. A 0.1% scrap rate from overshoot does not sound catastrophic until you multiply it across 21,600 cycles per day.
But the direct material cost is only the visible portion. The hidden costs accumulate invisibly: increased WIP buffer to absorb scrap variability, additional inspection stations, process engineers diverted from value-add work to firefight recurring overshoot faults, and the gradual erosion of confidence in automated processes that leads to conservative parameter windows and reduced overall equipment effectiveness (OEE).
In medical device manufacturing, the stakes escalate further. A single overshoot during the assembly of a drug-delivery cartridge can compromise sterile barriers, deform precision fluidic channels, or crack optically critical surfaces. Regulatory validation protocols mean that any process change requires extensive re-qualification. An overshoot-prone process becomes frozen in place, resistant to the continuous improvement that modern manufacturing demands.
Why Conventional Approaches Hit a Wall
The root cause runs deeper than controller tuning or sensor selection. Traditional force control architectures treat force as a secondary variable derived from motor current or an external load cell. The control loop bandwidth is fundamentally limited by mechanical transmission elements, sensor placement, and the computational latency of the feedback path.
When an actuator traveling at 100 mm/s contacts a rigid surface, the force rises from zero to potentially destructive levels within milliseconds. If your control loop executes at 1 kHz — a respectable rate for general motion control — you have perhaps one or two control updates to respond. In practice, the mechanical system has already stored elastic energy in couplings, ball screws, and frame structures. That energy releases as overshoot regardless of what the controller does next.
Adding mechanical compliance — springs, elastomer pads, flexure joints — can absorb some impact energy. But compliance conflicts with positional accuracy. A soft touch becomes an imprecise touch. In precision assembly, we need both: the gentleness of a compliance-equipped system and the repeatability of a rigid, direct-drive architecture.
A Different Architectural Philosophy
The breakthrough requires rethinking force control from first principles. Rather than treating force as a derived variable to be controlled reactively, what if the system could predict force behavior before it occurs? What if the controller could model the mechanical dynamics of the entire drivetrain — motor, transmission, and load — and calculate the precise torque command that achieves the desired contact force without overshoot?
This is the domain of model predictive control (MPC), a control methodology well-established in process industries but historically challenging to implement in high-speed electromechanical systems due to computational demands. The key enablers have been the emergence of powerful embedded processors capable of executing complex optimization algorithms at rates previously reserved for simple PID loops, and the development of high-fidelity dynamic models of precision motion systems.
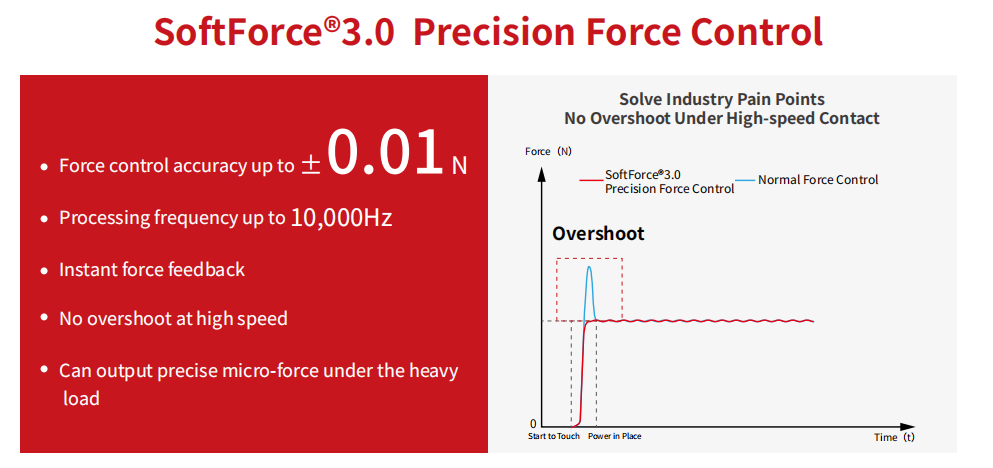
An MPC-based force control architecture operating at 10 kHz — ten thousand control decisions per second — approaches the problem fundamentally differently. It does not wait for force to deviate from setpoint before responding. It continuously predicts the future state of the system based on current position, velocity, and modeled dynamics, then computes the optimal motor command to reach the desired force trajectory. The result is contact behavior that appears almost prescient: rapid approach, instantaneous recognition of contact, and immediate transition to stable force output without the characteristic overshoot spike.
SoftForce® 3.0 Precision Force Control
- Predictive contact: MPC-based architecture at 10 kHz eliminates force overshoot at the moment of contact.
- Speed without compromise: Maintain high approach velocities while guaranteeing stable force transition to setpoint.
- Process intelligence: Clean force-position traces enable quality signatures and predictive maintenance.
- Direct-drive integration: Stiff mechanical design without reliance on compliance workarounds.
What This Means on the Assembly Floor
For the practicing automation engineer, the implications reshape how we design precision assembly processes.
Decoupling approach speed from contact safety
Traditional systems demand slow final approach velocities — sometimes 1 mm/s or less — to limit impact energy. An advanced predictive force control system can maintain approach speeds an order of magnitude higher, confident that contact force will transition smoothly to setpoint. Cycle time improvements of 15–30% in press-fit and placement operations are achievable without compromising process safety.
Eliminating mechanical compliance as a process requirement
When force control itself provides the necessary softness at contact, the mechanical design can prioritize stiffness and precision. Fixture designs simplify. Tooling costs decrease. Changeover between product variants becomes faster because the process is less dependent on mechanical overtravel protection tuned to specific part geometries.
Enabling force-position hybrid processes
Consider a typical screen adhesion cycle: rapid approach, gentle contact and force ramp, constant-force hold during adhesive cure, then precise position-controlled separation. With conventional force control, the transitions between these phases are where failures occur — the force-to-position handoff, the initial contact transient. A system with true overshoot elimination makes these transitions deterministic and repeatable.
Process data integrity
When force traces are clean — free from the ringing, overshoot, and settling artifacts that plague conventional systems — the force-position curve becomes a genuine quality signature. Correlating process signatures to final part quality becomes statistically meaningful. Predictive maintenance based on gradual changes in force profile characteristics becomes possible. The actuator evolves from a motion device to a process intelligence platform.
The Path Forward for Precision Assembly
The manufacturing landscape driving these requirements is not static. Miniaturization continues across electronics, medical devices, and automotive sensors. Component values increase as functionality concentrates into smaller packages. Materials diversify — glass, ceramics, composites, and thin-film structures that tolerate no plastic deformation. Regulatory scrutiny intensifies, demanding process validation evidence that is difficult to generate when your primary process variable exhibits stochastic overshoot behavior.
Against this backdrop, the persistence of force overshoot as an accepted feature of precision automation becomes increasingly difficult to justify. The question is no longer whether your force control system can achieve a given accuracy under ideal steady-state conditions. The question is whether it can guarantee that accuracy at the moment of contact, under dynamic conditions, every cycle, for years of production.
The engineering teams that solve this problem will not just reduce scrap rates. They will unlock process capabilities that were previously inaccessible. They will design assembly sequences without the safety margins and speed compromises that conventional force control demands. They will build lines that are simultaneously faster, more capable, and more forgiving of component variability.
For those of us who have watched high-value workpieces destroyed by a force spike that lasted mere milliseconds, who have sat in post-mortem meetings calculating the cost of a single bad cycle, who have lain awake wondering if tomorrow's production run will repeat yesterday's overshoot failures — the availability of a fundamentally different approach to force control represents more than a technical improvement. It represents the removal of a constraint that has silently shaped how we design, how we program, and how we think about precision assembly.
The future of precision automation belongs to systems that can touch without damaging, press without overshooting, and adapt without hesitating. The technology to achieve this exists. The industry imperative to adopt it grows stronger with every scrapped workpiece, every line stoppage, every customer complaint traced back to a force transient that should not have happened.
For precision assembly engineers, the overshoot problem is solvable. The only question is how many more high-value components we are willing to sacrifice before we solve it.
This article is based on industry engineering practice and official RobustMotion SoftForce® product documentation. Process economics and control performance figures reflect typical precision assembly applications as of early 2026.
Evaluating Force Control for Your Next Assembly Station?
Share your contact forces, cycle times, and workpiece fragility requirements. RobustMotion can help assess SoftForce® integration for overshoot-critical precision processes.