SoftForce® 精密力制御技術
速度と精度が融合するとき、力制御の限界はどう再定義されるのか
—「電流ループ」か「センサーループ」かという二者択一を打破する、SoftForce® 3.0 の産業化価値
一、業界課題:力制御技術における「不可能の三角」
スマート製造が高度化する現在、精密力制御は半導体パッケージ、3C電子組立、新エネルギー電池製造などの先端分野における中核技術になっています。ところが現場では長年にわたり、速度・精度・コンプライアンス性を同時に満たすことが難しく、実装時に必ずトレードオフが生じてきました。
電流ループ式力制御
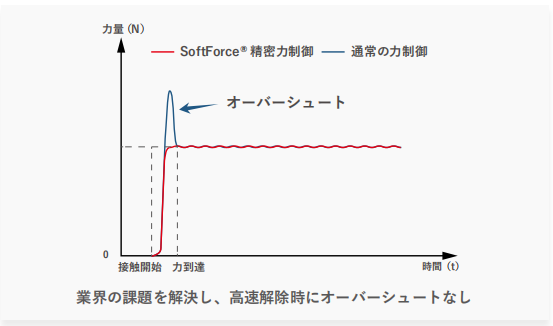
モーター電流から推力を推定する方式で、低コストかつ構成がシンプルという強みがあります。一方で、摩擦・慣性・温度ドリフトの影響を受けやすく、実運用の力制御精度は一般に ±0.1N 程度、場合によってはそれ以下に留まります。高速動作では応答遅延起因のオーバーシュートも発生しやすくなります。
センサーループ式力制御
力センサーで荷重を直接測定するため、静的精度は向上します。しかし、センサー応答遅延や信号ノイズの影響が残るため、高速・高周波環境では衝突やワーク損傷につながるオーバーシュート問題を完全には回避できません。
結果として、どちらの方式でも「速度・精度・コンプライアンス性」の三要素が相互制約し、いわゆる「力制御の不可能三角」を形成します。高価値かつ脆弱なワークを扱う精密組立・搬送・検査では、この制約が歩留まり低下と生産性ボトルネックの根本要因になっていました。
二、技術的ブレークスルー:SoftForce® 3.0 の基盤技術革新
RobustMotion が独自開発した SoftForce® 3.0 高精度力制御システムは、この課題に対する包括的な解です。革新はアルゴリズム層、ハードウェア層、システム層の三位一体で実現されています。
2.1 アルゴリズム層:MPC(モデル予測制御)の産業応用
従来の PID や単純フィードバック制御と異なり、SoftForce® 3.0 は MPC ベースのハイブリッド制御戦略を採用しています。
- 予測補償制御:接触前に運動モデルから接触点剛性・位置・必要推力を予測し、出力カーブを先回り補正
- 多変数結合最適化:位置・速度・力を同時演算し、カスケード切替ではない統合最適制御を実現
- 衝撃力の能動抑制:フィードフォワードとフィードバックを融合し、接触瞬間のピーク衝撃を発生前に低減
2.2 ハードウェア層:10kHz リアルタイム閉ループ制御
| 技術指標 | 一般的な業界水準 | SoftForce® 3.0 |
|---|---|---|
| 制御演算周波数 | 1kHz ~ 2kHz | 10,000Hz(10kHz) |
| 力制御精度 | ±0.1N ~ 数N | 最高 ±0.01N(1‰) |
| 高速時オーバーシュート | 一般的に発生 | オーバーシュートレス(No Overshoot) |
| コンプライアンス応答 | 剛性主体 | 高コンプライアンス自適応 |
10kHz とは、1秒間に 10,000 回の演算ループを実行することを意味します。つまり 0.1ms ごとに「検知-判断-実行」の閉ループを完了し、高速条件でも安定した力制御をハードウェアレベルで成立させます。
2.3 システム層:力・位置・速度のハイブリッド制御
SoftForce® 3.0 は「力制御モード」と「位置制御モード」を切り替えるだけの仕組みではありません。同一制御周期内で力・位置・速度を統合最適化します。
- 定圧制御:研磨・圧入工程で ±0.01N の安定推力を維持しつつ位置誤差を自動補正
- 力位置ハイブリッド制御:精密組立で位置をガイド、力を制約としてソフトランディングを実現
- 高ダイナミック応答:位置ずれや材質ばらつきなどの外乱に対し 0.1ms 以内で推力を補正
三、適用価値:研究室性能から生産ライン価値へ
技術の価値は現場課題を解決できるかで決まります。SoftForce® 3.0 は複数の高難度産業で有効性を示しています。
3.1 半導体パッケージ分野:「一粒のチップが金に等しい」世界を守る
- 高速ダイボンディング:接触荷重を常時 ±0.01N 以内に制御し、Die Crack リスクを低減
- ウェーハ搬送:100μm 以下の超薄型ウェーハに対し、適応型力制御でエッジ把持を安定化
- SMT 実装:0201/01005 クラス実装時の圧入力を高精度制御し、はんだ飛散とマンハッタン現象を抑制
3.2 3C電子組立:精密部品への「優しい接触」
- カメラモジュール組立:レンズ圧入中の樹脂変形をリアルタイム補償し、同軸精度を確保
- タッチパネル・ボタン検査:一定速度押圧と 10kHz サンプリングで力-変位曲線を高精度取得
- スマートフォンフレーム研磨:定圧フローティング研磨で曲面追従性を高め、品質ばらつきを縮小
3.3 新エネルギー電池:安全性と生産効率の両立
- 電芯ソフトクランプ:膨張・収縮するパウチセルの把持力をリアルタイム自動調整
- 電芯ケース挿入:位置ずれと干渉をリアルタイム検知し、コンプライアンス制御で柔軟挿入
- バッテリー膨張検査:一定荷重での厚み測定により、判定再現性と検査精度を向上
3.4 医療・バイオ分野:生命に関わる精密制御
- 医療機器組立:カテーテル・シール部品圧入で密封性と生体適合性の安定化に貢献
- 手術ロボット:鉗子把持力と牽引力をリアルタイム制御し、軟組織損傷リスクを低減
- ラボオートメーション:分注・細胞操作で μN レベル制御を支え、実験再現性を向上
四、顧客価値:SoftForce® 3.0 が生産ラインにもたらす利益
| 価値項目 | 効果 |
|---|---|
| 歩留まり向上 | ±0.01N 精度 + オーバーシュートレス制御によりワーク損傷を低減 |
| タクト向上 | 高速動作中でも安定した力制御を維持 |
| 段取り替え効率 | デジタルパラメータ設定で機械調整工数を削減 |
| 保守コスト削減 | エア源不要で空圧設備コストを圧縮 |
| データトレーサビリティ | 力-位置データの全記録により品質追跡と工程最適化を実現 |
コアバリュー
「精密力制御」を、生産ラインのボトルネックから歩留まり・生産性向上のレバレッジポイントへ転換します。
五、産業的意義:力制御技術の自立突破
精密力制御は長年、欧米・日本企業による寡占領域でした。SoftForce® 3.0 の実用化は、「力制御アルゴリズム-センサ融合-高速リアルタイム制御」を一体化した技術閉ループの確立を意味します。これは単なる代替技術ではなく、力制御性能の新基準を定義する取り組みです。
- 「低速高精度」から「高速高精度」へ:速度と精度は両立しないという常識を刷新
- 「単一制御」から「ハイブリッド知能制御」へ:MPC と 10kHz ハードウェア融合の新方向を提示
- 「装置供給」から「工程ソリューション」へ:二次開発インターフェースを通じて工程価値を最大化
結語
世界の製造業が「ナノレベル精度 + ミリ秒応答」の競争へ移行する中、力制御は付加価値ではなく競争優位そのものです。SoftForce® 3.0 は 10kHz リアルタイム制御を軸に、精密モーション領域での技術革新力を示しました。今後、半導体・新エネルギー・医療などの先端産業において、スマート製造を支える基盤技術としてさらに重要性を高めていきます。
SoftForce® 3.0 を実ラインで評価しませんか?
対象ワークとタクト要件に合わせ、最適なアクチュエータ構成と制御パラメータをご提案します。