RM-PLA-HF
SoftForce® 直線テーブルタイプ
リニアアクチュエーター

SoftForce® 直線テーブルタイプ
リニアアクチュエーター
| 項目 | パラメータ説明 | |||||
|---|---|---|---|---|---|---|
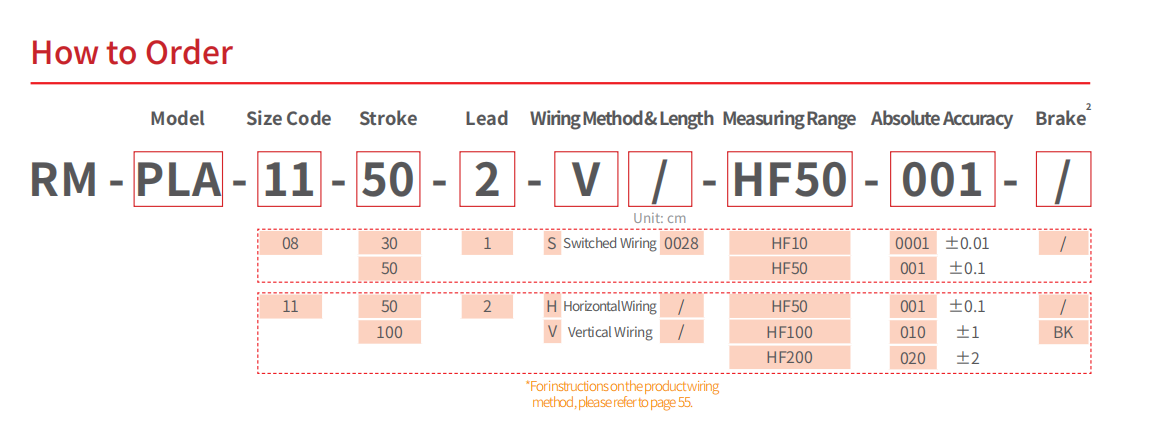
| 型番説明 | モデル | RM-PLA-08-30-1-HF | RM-PLA-08-50-1-HF | RM-PLA-11-50-2-HF | RM-PLA-11-100-2-HF | |
| 寸法番号 | 08 | 08 | 11 | 11 | ||
| 質量 | 0.5 kg | 0.7 kg | 1.0 kg | 1.2 kg | ||
| 寸法 | 193*25*44 mm | 213*25*44 mm | 300*37.5*50.5 mm | 350*37.5*50.5 mm | ||
| 性能パラメータ | ストローク | 30 mm | 50 mm | 50 mm | 100 mm | |
| リード | 1 mm | 1 mm | 2 mm | 2 mm | ||
| 最大速度 | 50 mm/s | 50 mm/s | 100 mm/s | 100 mm/s | ||
| 最大負荷質量(水平) | 0.5 kg | 0.5 kg | 0.5 kg | 0.5 kg | ||
| 最大負荷質量(垂直) | 1 kg | 1 kg | 1.5 kg | 1.5 kg | ||
| 繰り返し精度 | ±0.02 mm | ±0.02 mm | ±0.02 mm | ±0.02 mm | ||
| 制御方式 | 兼用のコントローラー | RM-CEPF-20 ; RM-CEMSF-20 | RM-CEPF-20 ; RM-CEMSF-20 | RM-CEPF-20 ; RM-CEMSF-20 | RM-CEPF-20 ; RM-CEMSF-20 | |
| サポートのバス | RM-CEPF コントローラはサポート:EtherCAT; Modbus RTU; I/O RM-CEMSF コントローラはサポート:Modbus TCP; PROFINET; CC-LINK; Modbus RTU | |||||
| 稼働環境 | 定格電圧 | DC24 ±10%V | DC24 ±10%V | DC24 ±10%V | DC24 ±10%V | |
| 定格電流 | 2A | 2A | 2A | 2A | ||
| 使用環境 | 0 ~ 40℃、85%RH 以下(但し、結露なきこと) | |||||
| IP 保護等級 | IP40 | IP40 | IP40 | IP40 | ||
| 寸法番号 | ストローク | 閉ループの出力範囲 | |||
|---|---|---|---|---|---|
| HF10-0001 | HF50-001 | HF100-010 | HF200-020 | ||
| 08 | 30 mm、50 mm | 0.02 ~ 9.98N | 0.2 ~ 38.5N | / | / |
| 11 | 50 mm、100 mm | / | 0.2 ~ 49.8N | 1.1 ~ 98.9N | 2.1 ~ 197.9N |
注:試験データは25℃の実験室で測定。
1.把持力の参考値は±15%であり、実際の把持効果は、ワークピースの材質、表面状態、把持ポイントの位置などの要因によって異なります。データは25℃の実験室での測定結果に基づいています。
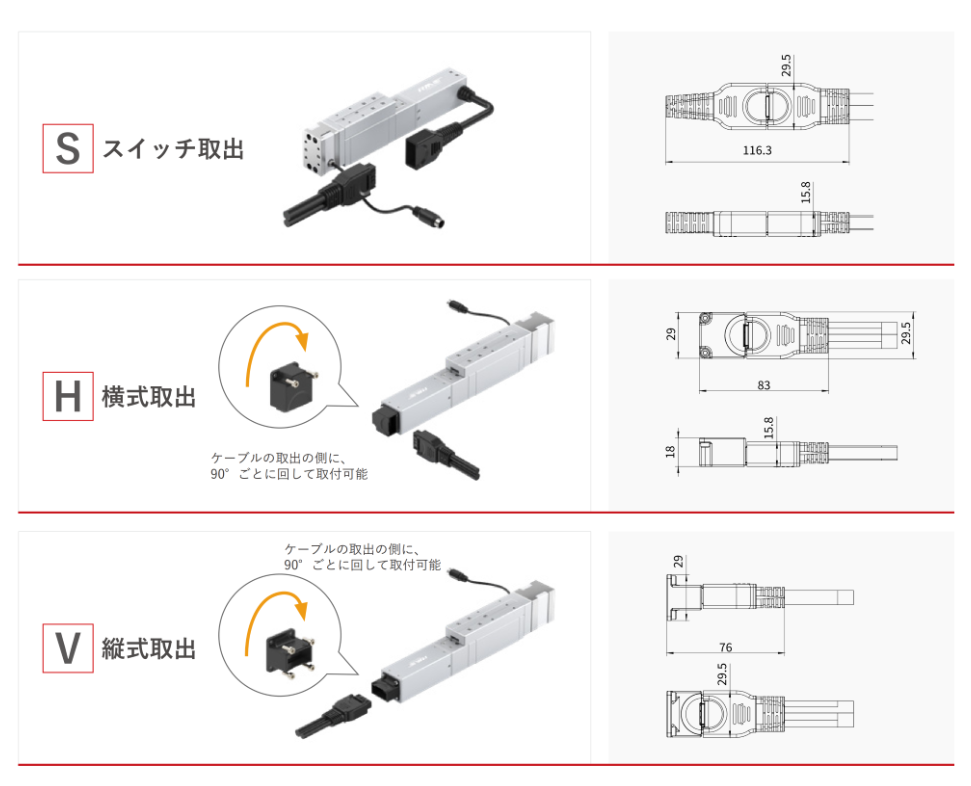
2.本製品マニュアルの寸法図は、スタンドモデルの寸法図です。カスタマイズするモデルの寸法図(モーター方向、ケーブル取出方向・方式など)については、お近くの営業担当者にお問い合わせください。
RM-PLA-HF SoftForce 直線プラットフォームタイプリニアアクチュエータは、以下の特長を持っています:
RM-PLA-HFは、以下の通信プロトコルをサポートしています:
また、I/Oおよびパルス制御モードもサポートしています(RM-CEMF-55コントローラを除く)。
08サイズと11サイズの主な違い:
用途や必要な力範囲に応じてサイズを選択してください。
PLA-HFには以下のセンサーオプションがあります:
必要な出力力範囲に基づいてセンサーを選択してください。
RM-PLA-HFは以下のコントローラーに対応しています:
異なるアプリケーション要件に対応した柔軟な制御オプションを提供します。
RM-PLA-HF SoftForce 直線プラットフォームタイプリニアアクチュエータは、以下の用途に最適です:
RM-PLA-HF SoftForce 直線プラットフォームタイプリニアアクチュエータは、精密な力制御が必要な以下のアプリケーションに最適です: