SLA——直線タイプリニアアクチュエータ
並列取り付け可能 | 高繰り返し精度 | 適応押し当て | 広出力範囲


直線タイプ

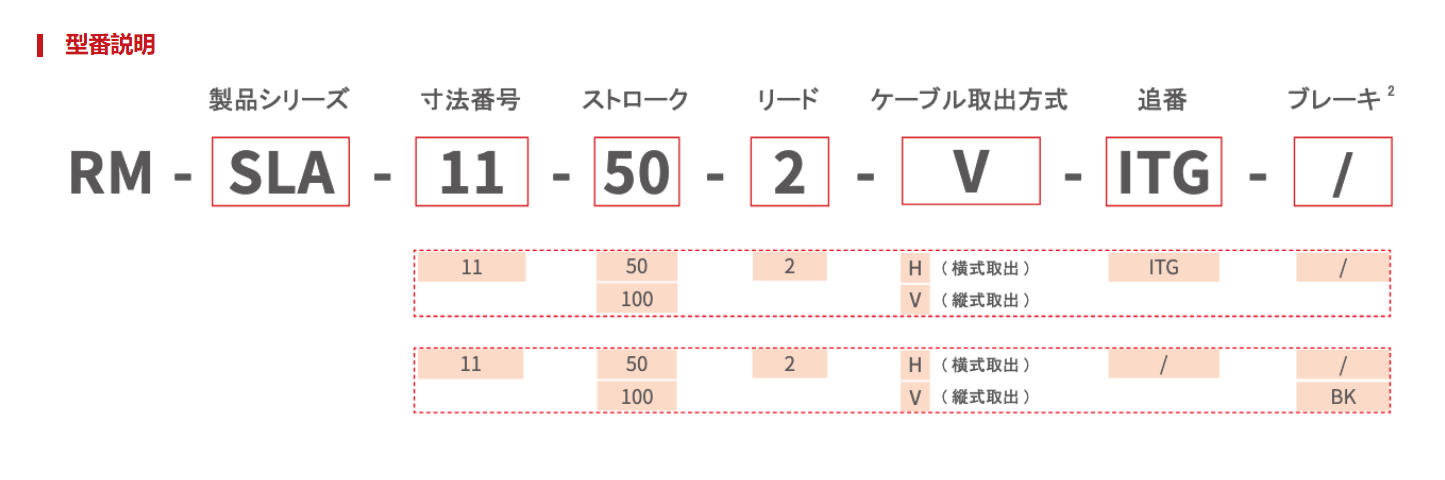
| モデル | RM-SLA-11-50-2-ITG | RM-SLA-11-100-2-ITG |
|---|---|---|
| 寸法番号 | 11 | 11 |
| 質量 | 0.7 kg | 0.9 kg |
| 寸法 | 288*35*35.5 mm | 338*35*35.5 mm |
| ストローク | 50 mm | 100 mm |
| リード | 2 mm | 2 mm |
| 最大速度 | 100 mm/s | 100 mm/s |
| 最大推力1 | 300 N | 300 N |
| 垂直最大負荷質量 | 1.5 kg | 1.5 kg |
| 繰り返し精度 | ±0.02 mm | ±0.02 mm |
| ロードの回転しない精度 | ±1.5° | ±1.5° |
| コントローラー | 内蔵 | 内蔵 |
| 通信・制御方式 | Modbus RTU; I/O | Modbus RTU; I/O |
| I/O インターフェース | 3 IN/3 OUT (NPN) | 3 IN/3 OUT (NPN) |
| 定格電圧 | DC 24V ±10% | DC 24V ±10% |
| 定格電流 | 2A | 2A |
| 使用環境 | 0 ~ 40℃、85%RH 以下 | 0 ~ 40℃、85%RH 以下 |
| IP 保護等級 | IP40 | IP40 |
直線タイプ

| モデル | RM-SLA-11-50-2 | RM-SLA-11-100-2 |
|---|---|---|
| 寸法番号 | 11 | 11 |
| 質量 | 0.7 kg | 0.9 kg |
| 寸法 | 273*35*35.5 mm | 323*35*35.5 mm |
| ストローク | 50 mm | 100 mm |
| リード | 2 mm | 2 mm |
| 最大速度 | 100 mm/s | 100 mm/s |
| 最大推力1 | 300 N | 300 N |
| 垂直最大負荷質量 | 1.5 kg | 1.5 kg |
| 繰り返し精度 | ±0.02 mm | ±0.02 mm |
| ロードの回転しない精度 | ±1.5° | ±1.5° |
| コントローラー | RM-C-20; RM-CEP-20; RM-CEMS-20 | RM-C-20; RM-CEP-20; RM-CEMS-20 |
| 通信・制御方式 | EtherCAT; Modbus TCP; PROFINET; Modbus RTU; I/O | |
| I/O インターフェース | コントローラ仕様による | |
| 定格電圧 | DC 24V ±10% | DC 24V ±10% |
| 定格電流 | 2A | 2A |
| 使用環境 | 0 ~ 40℃、85%RH 以下 | 0 ~ 40℃、85%RH 以下 |
| IP 保護等級 | IP40 | IP40 |
注:試験データは25℃の実験室で測定。
1.把持力の参考値は±15%であり、実際の把持効果は、ワークピースの材質、表面状態、把持ポイントの位置によって異なります。データは25℃の実験室での測定結果に基づいています。
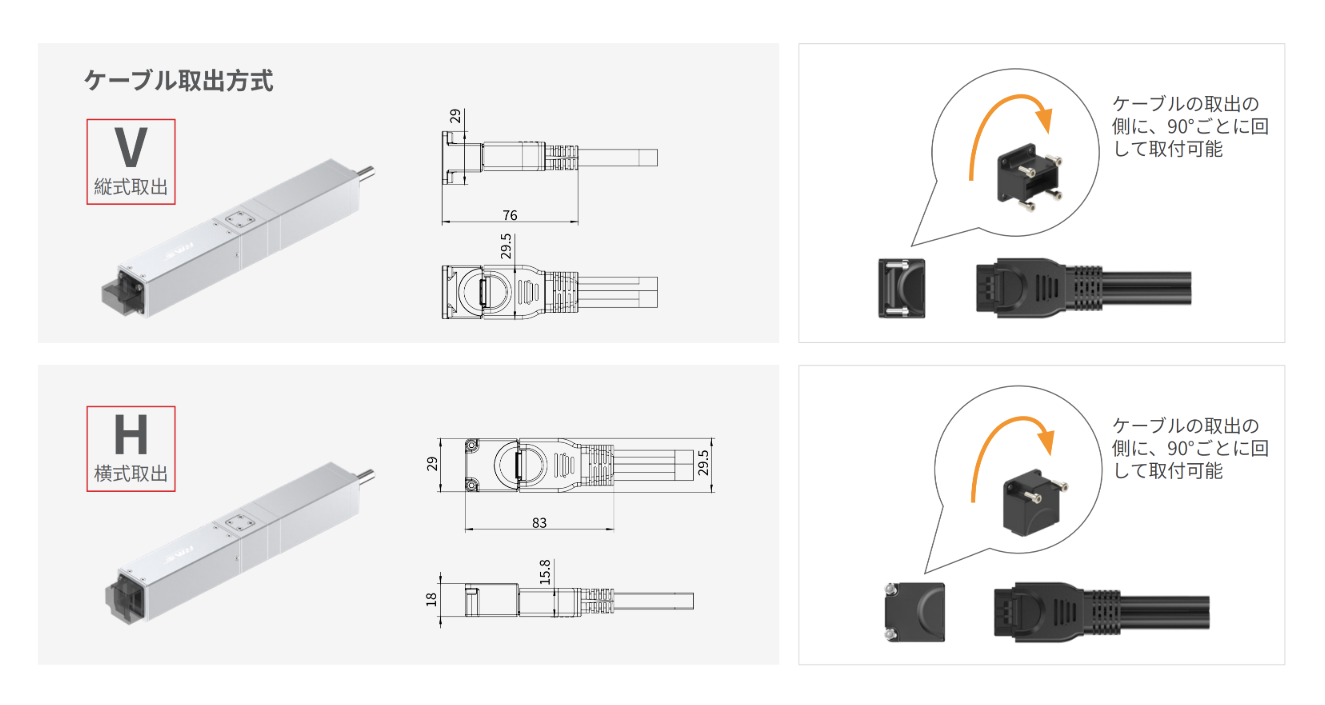
2.本製品マニュアルの寸法図は、スタンドモデルの寸法図です。カスタマイズするモデルの寸法図(モーター方向、出線方向、出線方式などが異なるモデル)が必要な場合は、お近くの営業担当者にお問い合わせください。
ITGモデル(Integrated):アクチュエータ本体にコントローラーが内蔵されています。
分離型モデル:外部コントローラーを使用するアクチュエータで、注文時に対応するコントローラーを選択する必要があります。
対応コントローラーについては、シリーズの技術仕様をご参照ください。必要な通信プロトコルを確認することで、正確なコントローラーモデルを決定できます。
はい。RM-EGBシリーズを除くすべてのRM電動アクチュエータは、RMソフトウェア(V6バージョン)を使用して接続する必要があります。
各製品の詳細なメンテナンス手順については、ユーザーマニュアルをご参照ください。
電動リニアアクチュエータは、電気エネルギーを精密なリニアモーションに変換し、負荷の押し、引き、持ち上げ、または下降を可能にします。電動モーターで駆動され、プログラム可能な電子機器で制御されるこれらのアクチュエータは、以下を含む様々なファクトリーオートメーションおよび産業アプリケーションに正確な力と位置制御を提供します:
空圧または油圧システムと比較して、電動アクチュエータは高い効率、クリーンな動作、優れた動作精度を提供します。高精度、再現性、プログラム可能な制御を提供し、速度、位置、力のリアルタイム調整が可能です。省エネ動作、低メンテナンス、デジタル制御システムとの容易な統合により、電動アクチュエータは産業オートメーション、ロボティクス、インテリジェント製造、精密ハンドリングアプリケーションで広く使用されています。